esp32-PID位置控制篇
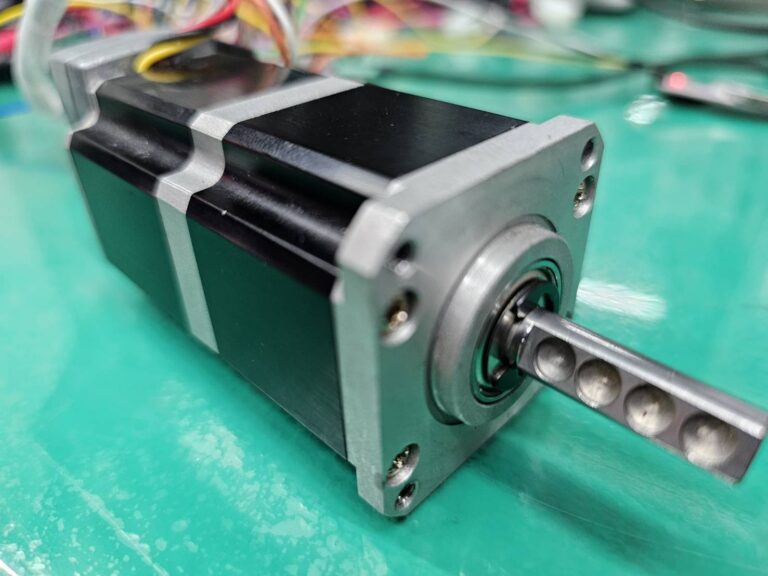
前幾篇介紹了編碼器的工作原理及PID的基礎理論,接下來要將兩個結合在一起,並且去控制馬達到指定位置...
前幾篇介紹了編碼器的工作原理及PID的基礎理論,接下來要將兩個結合在一起,並且去控制馬達到指定位置...
如果想要用uart來對淘晶馳的螢幕來進行軟體更新的話...

本篇教學是在vs code上可以進行編譯及執行python的程式碼...
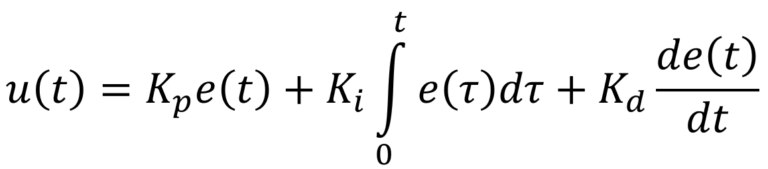
PID是Proportional-Integral and Derivative Control的簡寫,中文意思是比例、積分及微分控制,是一個經典的控制方式,幾乎在任何控制領域都遇的到PID...

編碼器是用於讀取馬達位置的一種感應器,透過旋轉內部的機械結構即可產生訊號,詳細的工作原理相信網路上有非常多了,本篇集中在實戰的部分...
STM32CubeIDE HAL庫常用涵式

在寫Python時會有一些常用到的短涵式,例如讀取目前檔案路徑、一個範例視窗...等,很多都是重複性很高但也沒有到需要import,因此這裡會放很多的小範例,也可以根據小範例減少開發的時間成本...
esp32可以用arduino編輯器來燒錄程式,這是最簡單便利的方法...

常常換設備就需要重新安裝一次涵式庫,因此在這裡放常用到的pip安裝指令...

在設計基本的3D結構最基本會遇到的問題是,螺絲孔徑要多少,這問題很多人有不同的答案,但也沒有絕對的答案,因為不同場合有不同的方式,不過根據我的經驗我會把最常用的孔徑大小放在這邊...