esp32-PID位置控制篇
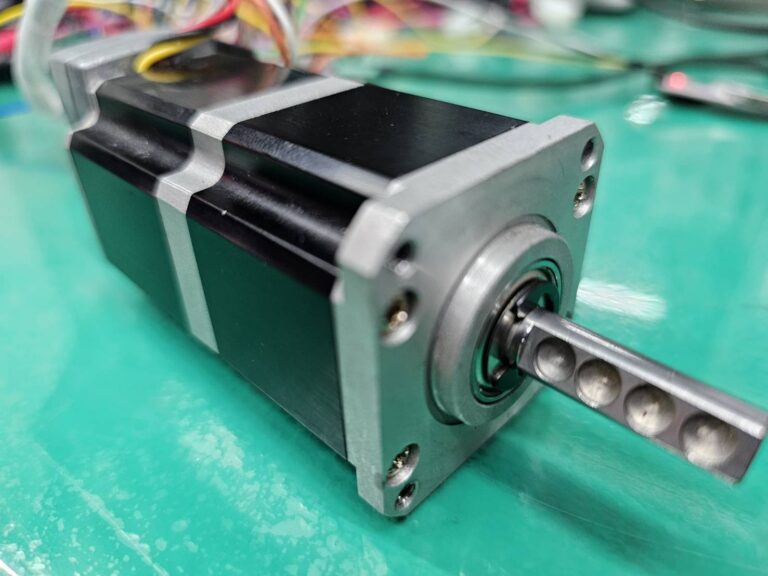
前幾篇介紹了編碼器的工作原理及PID的基礎理論,接下來要將兩個結合在一起,並且去控制馬達到指定位置...
前幾篇介紹了編碼器的工作原理及PID的基礎理論,接下來要將兩個結合在一起,並且去控制馬達到指定位置...
如果想要用uart來對淘晶馳的螢幕來進行軟體更新的話...

本篇教學是在vs code上可以進行編譯及執行python的程式碼...
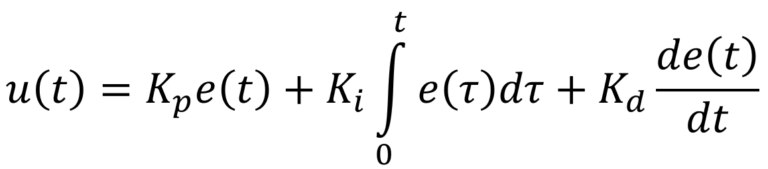
PID是Proportional-Integral and Derivative Control的簡寫,中文意思是比例、積分及微分控制,是一個經典的控制方式,幾乎在任何控制領域都遇的到PID...

編碼器是用於讀取馬達位置的一種感應器,透過旋轉內部的機械結構即可產生訊號,詳細的工作原理相信網路上有非常多了,本篇集中在實戰的部分...
是否有遇過在家被螞蟻攻佔,每次殺都殺不完呢?

不知道在外住宿舍的朋友,如果筆電或桌電沒有有線網路或是wifi,就必須用手機來當網路,但是如果用純wifi會減少網路品質,因此用usb來當有線網路是最有效率的方法,但是每次用usb插手機就已經夠不方便了,每次都還要到手機的網路設定,開啟usb分享網路才能使用...

通常加入環境變數的設定沒那麼直觀,但是自從Microsoft推出了Power Toys,一切都變得非常簡單了,讓我們來示範如何用Power Toys加入環境變數吧...
好的開發環境就需要簡單的涵式庫安裝,更能讓開發環境更多元,減少開發時間成本...
esp32可以用arduino編輯器來燒錄程式,這是最簡單便利的方法...