簡述
PID是Proportional-Integral and Derivative Control的簡寫,中文意思是比例、積分及微分控制,是一個經典的控制方式,幾乎在任何控制領域都遇的到PID,本篇主要是給剛接觸控制領域的朋友一些我的主觀觀念,希望大家可以更了解PID。
正文
經典PID
控制是甚麼,PID又是甚麼,剛接觸到這些想必都會毋砂砂,畢竟如果要深入探討控制領域的話還需要學習更多東西,數學的基礎理論…等,其實網路上也有非常多的教學及示範影片,每個都介紹的蠻詳細的,因此在這裡主要都是分享我的主觀想法。
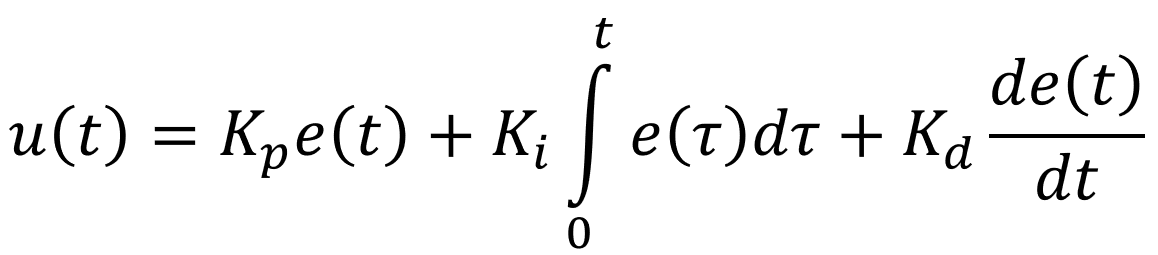
直上公式
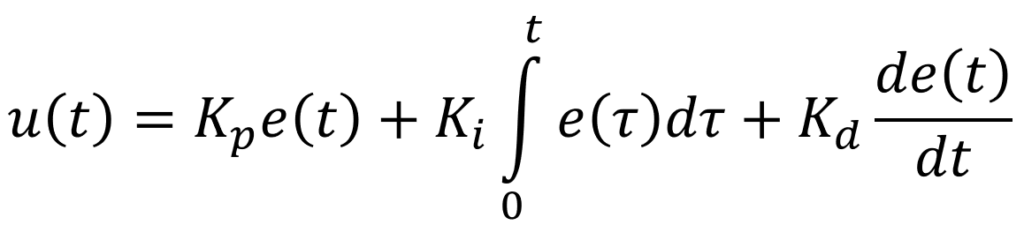
看起來挺複雜是吧!別擔心,一步步慢慢看會發現其實有規則的
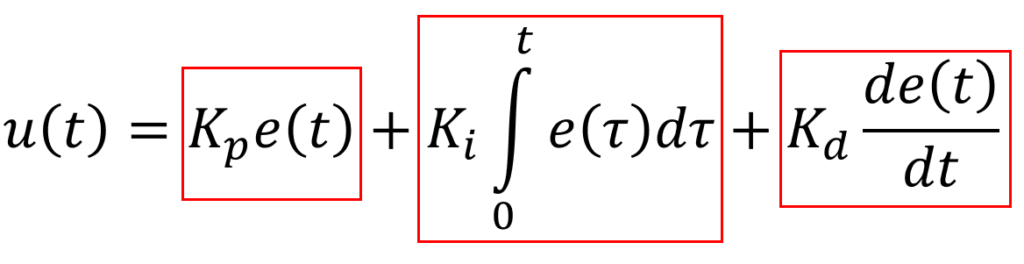
可以發現這不就是最基本的微積分而已嗎!沒錯就是單純微積分而已,也可以發現每個項式都是對誤差去做處理,u(t)就是輸出,e(t)是誤差,而誤差指的是目標值與目前現在的值的誤差。

以上就是基本的PID公式,但是在實作上有一個問題,到底怎麼去寫程式阿,如果說單純用以上公式去寫一個PID的程式碼是不可能的,因為他是一個連續的公式,而現實中不可能抓到連續的數值,一定都是離散式的,固定每幾秒讀一次值,只能要求取樣時間很小,但還是看系統需求而定,因此需要將以上公式利用差分法轉換成離散的,轉換結果如下。

這樣就可以在單晶片或者實作上應用PID拉。
速度PID
以上的PID控制都是根據位置、溫度這些0階狀態的控制,如果說要控制速度,比如說定速的話要將公式重新推導一次,因此將PID公式做微分可得到

因為I項積分後又微分因此可以化簡成e(t),將上述式子進行差分法後可得

將u(k-1)移項後可得

以上就完整的速度PID控制的方式拉。